






News
SafePerception Project
Technological advancement is rapid and ever-changing, and at Idneo, we stay at the technological forefront by participating in pioneering projects where testing and real-world trials are key to continued evolution.

In this way, Idneo leads the consortium for SafePerception, a platform framed within Target-X, a project co-funded by the EU focused on discovering the potential of 5G connectivity and how its use can enable previously unexplored functionalities. The goal is to demonstrate that a high-fidelity, real-time Digital Twin can be created from perception data of a physical vehicle, establishing a bridge between the real and virtual worlds.
The SafePerception team, made up of key professionals from Idneo, the Carlos III University of Madrid (UC3M), and i2CAT, met at Idneo's headquarters to carry out various tests aimed at validating the platform's complete functionality and end-to-end performance.
What tests were carried out?
- Real-World Data Capture: UC3M's test vehicle, equipped with advanced sensors (LiDAR, cameras, and GNSS), drove around a circuit detecting dynamic objects such as other cars and pedestrians.
- Onboard Processing and Perception: UC3M's state-of-the-art perception algorithms identified and classified these objects in real-time directly on the vehicle.
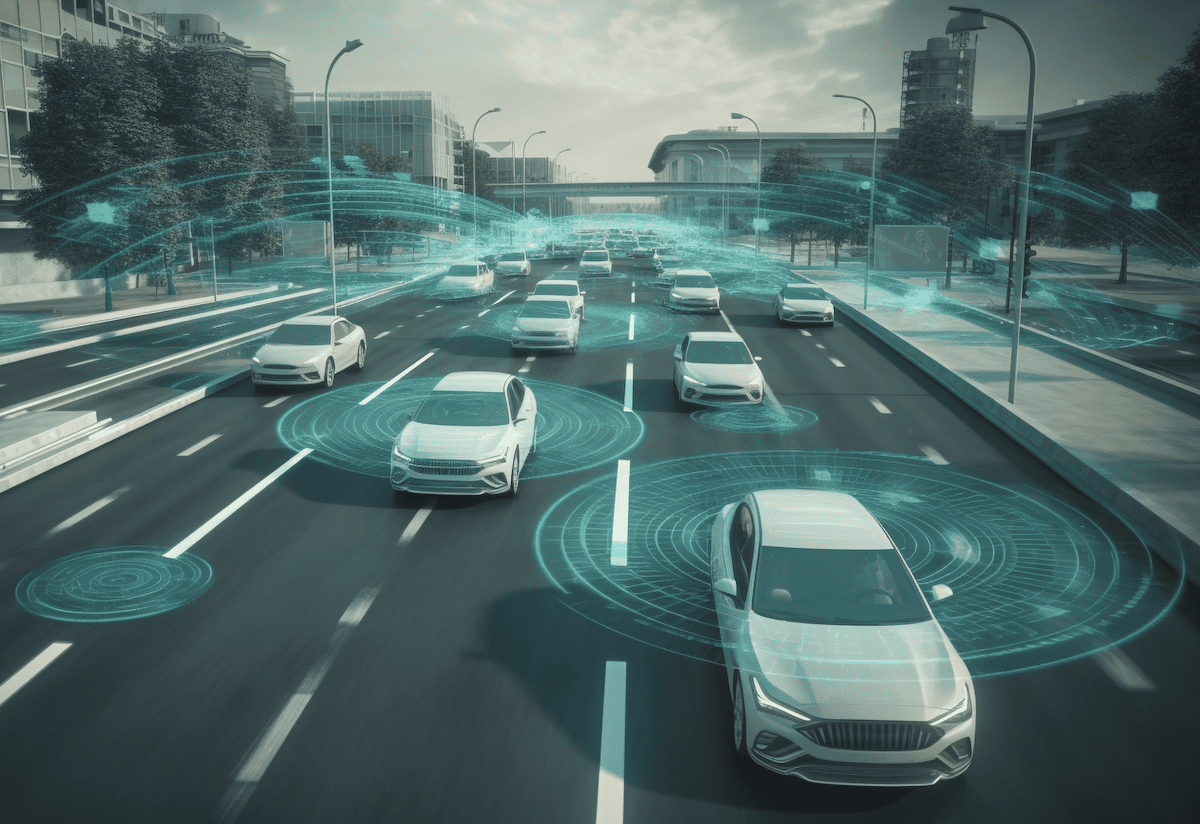
- 5G V2X Transmission: The information about the detected objects was encapsulated in Collective Perception Messages (CPM), using Idneo's V2X stack, in a standardized manner and transmitted over Idneo's private 5G network, ensuring very low RTT (<15 ms) communication latency.
- Digital Twin Creation: UC3M's Multi-access Edge Computing (MEC) server received and decoded the messages to instantly populate the CARLA simulator, recreating the scene with all its dynamic elements in their exact positions.
The platform achieves seamless integration across the development toolchain: advanced perception, 5G V2X connectivity, and high-fidelity simulation. SafePerception will allow for faster, safer, and more economical validation of Advanced Driver-Assistance Systems (ADAS) and autonomous driving functions.